
航点自动驾驶


一款干净可靠的自动驾驶模组——进入驾驶座,设置航点后按F6键,你的角色会像普通行人一样驾驶载具,遵循游戏原生GPS路线前往航点,抵达后自动停止并交还控制权。支持驾驶模式切换、HUD显示控制与全配置INI文件。
核心特性
原生GPS导航:严格遵循游戏内置GPS路线行驶,路径规划与官方一致,避免偏离或错误引导。
自动停靠终点:抵达航点后自动减速停车,平稳交还玩家操控权。
三种驾驶模式(按F7键循环切换):
谨慎模式:速度41公里/小时,接近航点时提前90米平缓减速,模拟保守驾驶风格。
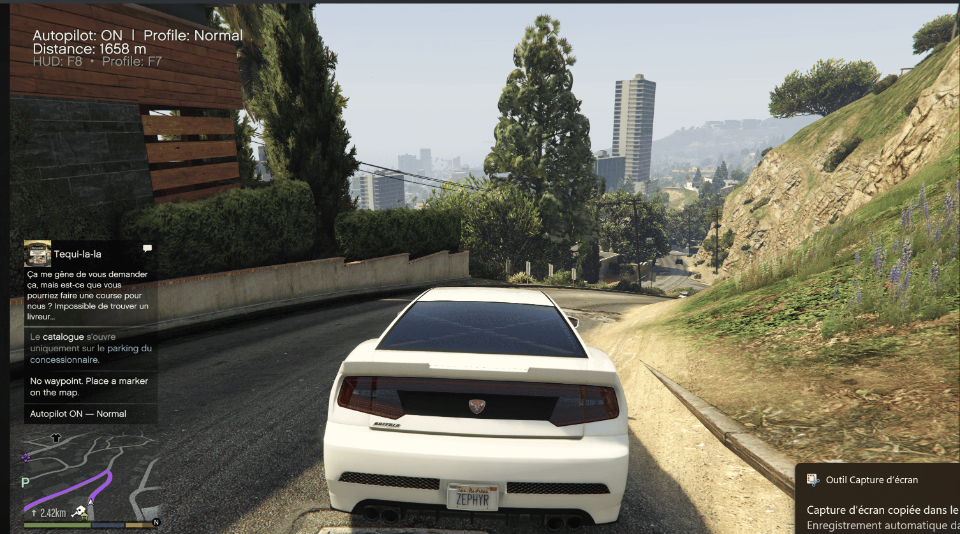
正常模式:速度49公里/小时,减速逻辑与谨慎模式一致,平衡效率与安全。
急促模式:更高速度(具体值可在INI中调整),优先快速抵达。
HUD显示控制(按F8键切换):
显示实时距离、自动驾驶状态(如“行驶中”“即将抵达”);
适配4K/超宽屏,自动缩放并锚定在小地图旁,避免遮挡视野。
全配置INI文件:支持调整键位、速度参数、驾驶风格、抵达半径、语言(法语/英语)等,满足个性化需求。
配置热重载:游戏中按F5键可即时重载INI配置,无需重启游戏。
控制键位(默认)
F6:开启/关闭自动驾驶
F7:循环切换驾驶模式(谨慎→正常→急促→谨慎…)
F8:切换HUD显示(开启/关闭距离、状态等信息)
F5:重载INI配置文件(编辑后即时生效)
使用说明
启动自动驾驶:
进入载具驾驶座,在地图上设置航点(按M键打开地图,点击目标位置);
按F6键激活自动驾驶,角色将接管驾驶。
调整驾驶模式:行驶中按F7键切换“谨慎/正常/急促”模式,实时改变速度与驾驶风格。
控制HUD显示:按F8键开启或关闭HUD(显示距离、状态等信息),避免干扰视野。
配置调整:
编辑模组目录下的INI文件,修改键位、速度上限、抵达半径(如设为50米提前停车)、语言(FR/EN)等;
修改后按F5键重载配置,即时应用新设置。
优化与细节
驾驶体验升级:谨慎/正常模式采用更真实的速度(41/49公里/小时),接近航点时提前90米平缓减速,避免急刹突兀感。
稳定性与显示优化:提升驾驶平顺度;HUD自动适配不同分辨率屏幕,确保信息清晰不遮挡。
总结:
通过模拟行人驾驶的AI逻辑与原生GPS导航,让长途驾驶变为“一键托管”,三种模式适配不同场景(观光、赶路、任务),配合HUD与INI配置,兼顾自动化与个性化,适合追求轻松驾驶或任务跑图效率的玩家。


注意!! 此mod与其他相同类型的mod有冲突,请单独使用!